Un saluto a tutto il gruppo e un ringraziamento a Roberto per l'ospitalità
Da circa 2 mesi sto lavorando ad un progetto di un multicottero che ho battezzato ArmQuad
Le caratteristiche sono:
Processore: ARM7 32Bit LPC2103 a 60Mhz
Gyroscopio: ITG-3200 triplo giroscopio da 2000°/s, interfacciamento I2C, 16bit, vari tagli di filtri passa basso selezionabili via software,sensore di temperatura integrato
Accelerometro: BMA-180 triplo accelerometro , interfacciamento I2C, 14bit, vari tagli di filtri passa basso, passa alto, passabanda selezionabili via software, sensore di temperatura integrato
Regolatori brushless: PWM commerciali pilotati a 450Hz
RX: è necessario un ricevitore con uscita seriale dei canali radio o in alternativa un convertitore parallelo / seriale da aggiungere ad una RX con uscita standard.
Tempo di esecuzione del ciclo loop completo con la configurazione attuale : circa 500microsecondi, 2Khz
La mia filosofia di costruzione e' di tipo step by step, si passa allo step successivo sia hardware che software soltanto quando lo step in corso e' terminato e funziona in modo ottimale oltre che sulla carta anche nei test di volo reale, questo consente di non trascinare eventuali errori hardware/software negli step successivi.
Dopo aver effettuato il primo volo utilizzando i giroscopi presenti all'interno del wii motion plus, ho deciso di impiegare i sensori sopra riportati, la routine di volo iniziale era la modalità ACRO, basata sul controllo retroazionato della velocità angolare.
In questi giorni ho integrato l'accelerometro e sto quindi testando la modalita' "autolivellante / stabile" basata sul controllo dell'angolo.
I prossimi upgrade saranno l' utilizzo di un ARM M3 Cortex a 100Mhz, l' integrazione di barometro i2c, compasso magnetico i2c e GPS per la navigazione a waypoint
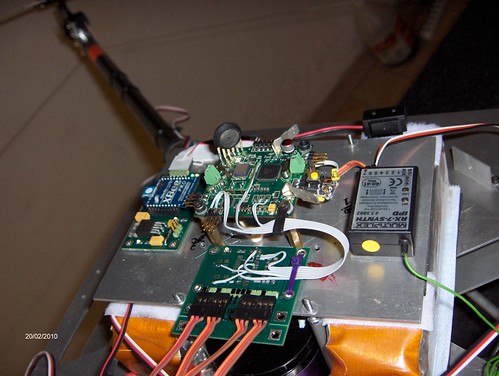
Sotto video del primo volo e alcune foto, i cablaggi sono ancora approssimativi in quanto mi trovo in piena fase sperimentale.
Saluti,
Danilo
Hi All,
this is my experimental project of a quadrorotor, ArmQuad:
ARM 7 32bit LPC2103 a 60Mhz
ITG-3200 Triple-Axis Digital-Output Gyro, 16bit, digitally-programmable low-pass filter
BMA180 Triple Axis Accelerometer, 14Bit, Programmable integrated digital filters
ESC: PWM at 450Hz
R/C RECEIVER: PPM composite signal
CONTROLL LOOP EXECUTION TIME with the current configuration : 500 uS, 2 Khz
After the first flight using the Wii Motion Plus in ACRO mode now I'm testing the angular control mode, the next updates will be:
ARM M3 Cortex 100Mhz
Barometric Pressure Sensor
Compass Module
GPS and waypoint navigation
Regards
Danilo