Un interessante iniziativa di VirtualRobotix che vuole diiffondere un po' di informazione sui droni e il loro utilizzo con particolare riferimento ai multirotori, molto in voga in questo periodo.
Durante il workshop verrà allestito un Quadricottero da uso modellistico e, temop permettendo, verrà fatta una breve dimostrazione di volo.
Posted by Roberto Navoni on September 27, 2013 at 1:00pm
This video is doing by our VRGimbal user VR Gimbal with Sony 3D HXRNX3D1U ( 720 gr) in handeld mode
This is a video using complete VRGimbal with Panasonic GH2
..and this is another video of the same copter (in HD)
Dear Friends,
These are specification of our : VR Gimbal :
Micro Controller is STM32F1 at 72 mhz.
3 Axis Brushless Direct Drive gimbal :
Roll (MOT1)
Pitch (MOT2)
Yaw (MOT3)
For each channel we have 3 high power pwm 5 Amp output .
I2C IMU that support 3 axis . It is on camera module , so we can know exactly the position of camera and control in realtime the 3 Brushless motors. MPU6050 (6 DOF) + HMC5883 (3 DOF)
1 USB port.
1 Serial port that support mavlink protocol.
1 Power module that support until 3S battery.
4 Radio RC Input for :
Control ROLL Setup.
Control Pitch Setup.
Control YAW Setup.
IR control repeater.
4 Analog Input 0-3.3v
1 IR Out , so is pssible to control a remote camera by its ir receiver.
On new revision 2.0 we add :
customizable push buton.
support for motors ampere monitor for each motors.
Very intuitive Firmware update tools.
Simple and powerfull VR Gui for VR Gimbal configuration.
Serial driver on USB port.
A complete and updated wiki repository with media gallery with last video from our user.
In this video is possible see the utility available for measure the current used by different kind of motors. This feature is very usefull for evaluate the specification of motors.
Is available a new tools for firmware update you can found more detail here :
So if you want to join in development you are welcome .
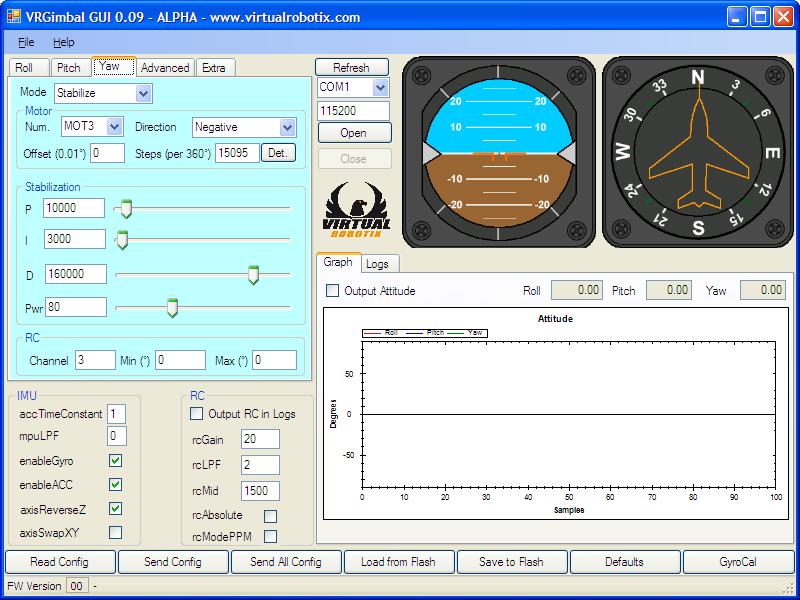
This is a screenshot of VR Gimbal Gui developed using .net technology, so could be work also using mono on mac and linux , test on that platform is welcome ,you can connect directly by usb to VR Gimbal or by radio link as 3dr module , blueetooth or other ttl wireles adapter :
We Upgrade also the VRGui with new functionality , slider full support of Pan axis and Full Frame.
With VRGimbal is possible to control this kind of gimbal ;
Handheld and Air Drone Gimbal 2-3axis Entry level gopro gimbal.
Handheld and Air Drone Gimbal 2-3axis Heavy dslr gimbal.
This is an example of video doing by our user of VRGimbal on heavy dslr gimbal :
This is official thread in virtualrobotix community is here join us for have more info and support :
Have mounted a power board + 6 30mm alu standoffs + 4 tube clamps (from flyduino.net) On the top center plate (at right) I have mounted 6 spacers with vibration damping.
ESC mounted to the side plates with the motor cables pointing to the ends of the side plates
The side plates mounted to the bottom plate – the ESC power cables will be soldered to the power board.
While waiting on the CTX4 V2 CNC work to be done, I have started a new project CX4M (a mini quad). I have finished the CX4M design. Next step is to get someone to do the CNC part (1,5mm carbone). The CTX4 V2 parts have arrived, so I can start working on that frame while waiting.
My CX4M setup:
Frame: 25-26 cm motor – motor (1,5mm carbone)
Motors: Turnigy Multistar 1900Kv
ESC: Afro 12A
Prop: 5x4.5x3
Controller: VRBRAIN (of course) + Ublox lea 6 GPS
LiPo: Zippy Compact 1000mAh 35C 3S
Camera: Mobius (HD recording + FPV)
FPV TX: 200mW 5,8Ghz
CTX4 V2 = C:Carbone T:Tube X:quad type 4:quad CX4M = C:Carbone X:Quad type 4:Quad M:Mini
CTX4 V2 (right) CX4M center plates (left) - The arm design was not ready when this CNC work was done.
10 Amp 3S battery flight time around 20 min without payload until 24 min.
In this test flight I checked the behavior of the drone in different situations both at high altitude I flew about 50 m high and low altitude. The video that is present in raw format created with the GOPRO 3 silver model you do not notice the presence of high-frequency vibrations, which were removed by introducing a special anti vibrating plate inserted between the frame of the drone and the gimbal . There are only some low-frequency vibrations due to the influence of the wind at high altitude on the mechanics of the gopro gimbal frame we're still working to improve it further. Overall, we think that this platform can be an interesting alternative to cars like the Phantom of the DJI is that in the previous version thanks to a range of great flight almost 20 minutes.
This drone configuration will be available in DIY KIT before the end of year in the next week will be available more info about it