Posted by Roberto Navoni on November 13, 2015 at 11:00pm
These are the first two ready to flight prototype picture of VR Brain Core .
Are available for OEM and Beta tester different configuration of board with STM32F4 or F7 and with some additional connector like USB / SD Card or without connector that normally are available on custom distribution board.
Actually we are working at the first custrom distribution board for our VR Wasp , the ultra light complete drone compliant to under 300 gr drone for urban enviroment .
This is a picture with comparison between VR Brain 5 , VR Brain Core 6 and VR uBrain 5 as you can see the design of the core is adapt for fast protyping and for simple integration inside custom design.
For check the new VR Core 6 on air we decide to use this simple frame in 5 minutes we replace the VR uBrain and test the new board .
In the video you can see the result of first flight ... It's impressive :)
All the APM firmwware normally available for VR Brain 5 : Copter, Standard Hely , Plane , Rover , Boat it's available for VR Core.
Here will be more information about the new OEM board :
We are discussing with Alessio Morale one of the founder of Libre Pilot project for support it inside his project.
I hope that you like this new design. It's not a replace of vrbrain and vrubrain but it's for OEM and special custom design where the integration is the must .
The board is only 5 grams
for more info contact me at : r.navoni@virtualrobotix.com
Posted by Roberto Navoni on November 15, 2014 at 10:30am
This is a video example of how you can add the telemetry module to VR micro brain and test the board with VR Pad Station. Now is possible to connect directly VR micro brain and VR micro Gimbal to VR Pad Station by a usb OTG cable.
These are the board developed by VR Lab : VR micro Gimbal , VR Multi Constellation GPS 8 ,VR Micro Brain and plug and play VR micro telemetry board .
Example how is possible to assemble the boards togheter , the form factor is very small and lightwheight .
In the picture below is presente the VRX Radio Module lite , Standard and Advanced ( OSD support )
This is an a video example of new VR micro Gimbal in action.
This is a very exclusive video example of fully autonomous fly using VR Leash experimental kit . You can set the position where put the drone by VR Leash natural reposition system or by PAD / Smartphone user interface available in VR Pad Station Pro.
Some of board use in these drone is already available :
Tested normal manual flight, alt hold, loiter and land - all Works fine
Alt hold and Loiter was impressive
In this test I used PPMSUM from my RX module
The CTX4 quad used in the test
T-motor 10" prop used. The motor Mounts/tube clamps have rubber rings to help reduce vibrations form the motors.
The VR Brain Controller is separated/vibration isolated from the frame using rubber Mounts (like the ones used on many camera gimbals, but smaller and softer) + soft pads
The motors are iPower MultiMate 2012 1000kv. When using 4000mAh 3cell LiPo I get 12-14 min before the VR Brain LiPo alarm starts.
I plan to make one more frame CTX4L (large) - that have larger motors and can use up to 12" props. Have ordered the New VR Brain 4.5 + IMU to use on this one. On that frame I´m going to Mount my VR Gimbal Controller and GoPro gimbal.
after a lot of month to work and 1 year of experience on VR Gimbal firmware now we are at release 1.20 I'm very happy to present a new revision of product.
VR micro Gimbal 4.0
In the video you can see the early preview of new product . VR micro Gimbal 4 derived from Brain 5 platform , it's based on Nuttx 7 O.S. support SD card for real time data logging and Mavlink protocol for direct integration with our advanced Flight Control VR Brain 5 and VR micro Brain 5 .
We aere working with other member to Dronecode foundation to try to define a standard for gimbal managment based on mavlink protocol .
We already implement a Mission Planner plugin for direct control the gimbal . Now we are discuss in dev team about the development of mavlink packet manager put over the nuttx os that can re direct mavlink traffic to correct device when it recived from ground station of from the specific application .
The new oem product will be available in the next month for beta tester and oem for more information send a mail to info@virtualrobotix.com
This is the first preview of Next Gen STm32F7 flight control by Virtualrobotix. New core , much power and a reliable solution based on industrial micro controller.
A new oem and hobbyst platform with full support for :
Copter
Helicopter
Plane
Rover
Boat
This new form factor is simple fast prototyping platform for your own custom design but a reliable design for your final solution. Th standard version of VR Brain core 6 support standard STM32F4 micro controller.
Suggestions are welcome.
Will be available in mass production Q1/16 prototypes for our OEM customers will be available in December 2015
If you are not already our OEM partner and are interested to the product contact me at r.navoni@virtualrobotix.com
Posted by Roberto Navoni on September 27, 2015 at 3:30am
Goodmorning everyone, I am happy to present the first Drone helicopter completely Made in Italy :)
Frame Protos 500 Helicopter
Flight Control: VR uBrain 5
GPS: GPS VR 8
System integration by Ferruccio Vicari :)
last month of work I had the honor and pleasure to personally meet one of the developers of Italian APM Helicopter. I was intrigued by the fact that among the many cards VR ubrain sold to run multicotteri there was Ferruccio, this is the name of our Ing. Aeronautical you are 'working on to try and improve on APM Helicopter VR Brain / uBrain and also on Pixhawk He is asking us to support firmware dell'hely and our hardware to be able to get their hands on it and make performance on its means.
Ever since I met and fell in love of his helicopters in fact the lab Virtualrobotix, whenever possible, is trying to give support to his work trying to better understand how to help Ferruccio solve the current limits of both the firmware of ' hardware. Putting all this work then available Community APM.
In particular the two innovative features present in the firmware version of Ferruccio are a curve of the management of the gas 3 points that allows to associate to the management of the collective of the helicopter, the power required to fly in a simple way the helicopter. And compensation roll according to the pitch of the tail, both changes that actually make a helicopter extremely docile.
In this video you can see the video of one of the many missions that the totally autonomous VR Hely is able to do without any kind of interference from the pilot it during take-off nor on landing. here's the video:
Questa e' una foto dell'installazione della micro brain e del sistema anti vibrante:
This and 'the graph of vibration present on VR uBrain about the frame of Protos 500 and also of the solutions adopted to cut the vibrations on the flight control
Another feature is the non-trivial reduces vibration and also here Ferruccio did an excellent job inventing support can cut the most 'can make vibration and actually like a normal quadricopter. So simple that I asked Ferruccio could feel myself with an old T-rex 470 to understand how different it was to fly a helicopter over a classic quadricotteri pilot who now for years.
The result was sensational in the second flight I was completely at ease.
Surely these means are complex and dangerous, you have to have skills to do a suitable setup and then you have to use them with care but as a result of flight times with petrol engines and payload transported there 'comparison with any other type of aircraft, it VTOL plane it much less quadricopter.
The video of my first flight with the VR uBrain 4.5 on my Trex 450
And that 'my second flight, never flown before helicopters ... I would say amazing :)
Here you can find many interesting videos on its marvelous Ferruccio helicopters.
I succesfully build the code in the Stefan’s Git , today i did my first fly with micro brain and Taulabs code , in this code you can find the binary for VR micro Brain and CGS for linux OS.
Have mounted a power board + 6 30mm alu standoffs + 4 tube clamps (from flyduino.net) On the top center plate (at right) I have mounted 6 spacers with vibration damping.
ESC mounted to the side plates with the motor cables pointing to the ends of the side plates
The side plates mounted to the bottom plate – the ESC power cables will be soldered to the power board.
today we going in production with the first batch of micro brain 5.1 board. After see some micro drone based on vrbrain fly , we decide to support the development of this great platform ... so we start to develop a special revision of VRbrain 5 for this kind of products where the small dimension and low weight are very important factor.
This is fully total autonomous platform available for micro drone.
These are the specification :
CPU STM32F4 VR OS based on NuttX kernel.
1 EEPROM or FRAM device for parameter storage.
IMU MPU6000 SPI.
MSIC Barometer 10 cm resolution.
8 PPM Radio RC Input .
8 PWM ESC - SERVO Output.
1 SBUS Radio Input compatible with Futaba SBUS and Spektrum ,too
1 SBUS Servo Output.
SD Card Reader
1 RGB LED
2 LED Output
1 Buzzer Output
On board telemetry module availabe at 433 / 868 mhz. (option)
connector for external VR GPS + MAGNETOMETER
dimension 4x4 .
native support of APM Firmware :
APM Copter
APM Plane
APM Rover
Custom firmware available for boat and Paramotor Drone.
I think that special new mode ad hybrid loiter and drift are very interesting for these great toys :)
some example of micro drone developed by Tommyleo and AleBS
Some info and example are available on italian forum baronerosso :
this is the first images from VR Lab . In these pictures you can see our entry level frame VR CopterX4-8
The frame make using good materials as Carbon Fiber and Ergal .
The frame configuration was an idea of Flavio Taborelli , that inside Virtualrobotix.IT is the CTO of mechanical department. This frame doing 2000 hours of flight without chrash so we decide to use this approach for develop our affordable frame.
The production of this frame will be start at the end of August .
The main advantage is that is a fully customizable and available as DIY KIT on in RTF configuration. This kind of frame is very good for hacking is possible to customize the cover with your color or layout :
or fully customize your frame this is an example :
All the frame is developed inside VR Lab using advanced mechanical 3D Cad.
In the next week will be some updates about the status of the project.
If you need more info or have suggestions we are happy to disucss with you about our last VR Copter
if you like our project Support our work and join us on facebook community :)
Posted by Roberto Navoni on September 27, 2015 at 3:31am
Buongiorno a tutti,
sono felice di presentarvi il primo drone elicottero completamente made in italy :)
Frame dell'elicottero Protos 500
Flight Control : VR uBrain 5
GPS: VR GPS 8
System integration by Ferruccio Vicari :)
nell'ultimo mese di lavoro ho avuto l'onore e il piacere di incontrare personalmente uno degli sviluppatori italiani di APM Helicopter . Sono rimasto incuriosito dal fatto che tra le tante schede VR ubrain vendute per far funzionare multicotteri ci fosse Ferruccio , questo è il nome del nostro Ing. Aeronautico che si sta' occupando di provare e migliorare APM Helicopter su VR Brain / uBrain e anche su Pixhawk che ci chiedeva supporto sul firmware dell'hely e sul nostro hardware per poterci mettere le mani sopra e renderlo performante sui suoi mezzi.
Da quando l'ho incontrato e mi sono innamorato dei suoi elicotteri infatti i lab di Virtualrobotix , nel limite del possibile , stà cercando di dare supporto al suo lavoro cercando di capire meglio come aiutare Ferruccio a risolvere gli attuali limiti sia del firmware che dell'hardware. Mettendo poi a disposizione tutto questo lavoro della community di APM .
In particolare le due caratteristiche innovative presenti nella versione del firmware di Ferruccio sono una curva di gestione del gas a 3 punti che consente di associare alla gestione del collettivo dell'elicottero la potenza necessaria per far volare in modo semplice l'elicottero. E la compensazione del roll in base al passo dell'elica di coda , entrambe modifiche che consentono di fatto di rendere un elicottero estremamente docile.
In questo video si può vedere il video di una delle tante missioni totalmente autonome che il VR Hely è in grado di fare senza alcun tipo di intervento del pilota ne in fase di decollo tantomeno in fase di atterraggio.
ecco il video :
Questa e' una foto dell'installazione della micro brain e del sistema anti vibrante:
Questo e' il grafico delle vibrazioni presenti sulla VR uBrain merito del frame del Protos 500 e anche delle soluzioni adottate per tagliare le vibrazioni sulla flight control
Altra caratteristica non banale è il contenimento delle vibrazioni e anche qui Ferruccio ha fatto un lavoro egregio inventandosi un supporto in grado di tagliare il piu' possibile le vibrazioni e rendere di fatto al pari di un normale quadricottero.
Tanto semplice che ho chiesto a Ferruccio di poter provare anch'io con un vecchio T-rex 470 di capire quanto fosse diverso pilotare un elicottero rispetto a uno dei classici quadricotteri che ormai piloto da anni.
Il risultato è stato strepitoso in 2 voli ero già completamente a mio agio.
Sicuramente questi sono mezzi complessi e pericolosi , bisogna avere competenze per poter fare un setup idoneo e poi bisogna usarli con cautela ma in quanto a risultati di tempi di volo con motori a benzina e payload trasportabili non c'e' paragone con nessun altro tipo di velivolo , ne VTOL , ne Aereo tanto meno quadricottero.
Il video del mio primo decollo con la VR uBrain 4.5 sul mio Trex 450
E questo e' il mio secondo volo , mai fatti volare prima elicotteri ... direi incredibile :)
Qui potete trovare tanti interessanti video di Ferruccio sui suoi meravigliosi elicotteri .
Posted by Roberto Navoni on September 28, 2015 at 1:00am
Per ottenere questo risultato , nel team di virtualrobotix nell'ultimo anno abbiamo lavorato moltissimo , tanti piccoli ingredienti che hanno contribuito a raggiungere l'obbiettivo.
La miniaturizzazione .
La Micro Brain : Un concentrato di tecnologia .
La nuova telemetria :
Un nuova Gimbal a 2 e 3 assi :
Un nuovo frame leggero e performante con una buona autonomia .
L'aumento dell'affidabilità e della precisione del GPS e del magnetometro.
I nuvoi ESC :
Lo sviluppo di nuovi tecnologie per il volo automatico , semplici ed affidabile:
Il VR Leash
I tools interni di sviluppo : L'interfacciamento al nostro mondo sintetico e Lo sviluppo di plugin avanzati per VR Pad Station : Il modulo X-Trace.
Un favoloso Team di sviluppo che ha continuato ad evolvere il nostro meraviglioso firmware :
Posted by Roberto Navoni on September 26, 2014 at 10:12am
Hello everyone, after some years of absence from the portfolio of the esc VR, I present the new design. We made choices very conservative to have 27 and 50 amp ESC from 4s to 6s ... we are doing tests and validations necessary because this is a very delicate component. Here are the first photos and video of the first test. The firmware supported are the Simonk and BHely, given the complexity of the topic we did not want to reinvent the wheel but to make a quality product that can be certified and has the ability to be installed on a dedicated distribution board.
This video is doing by our VRGimbal user VR Gimbal with Sony 3D HXRNX3D1U ( 720 gr) in handeld mode
This is a video using complete VRGimbal with Panasonic GH2
..and this is another video of the same copter (in HD)
Dear Friends,
These are specification of our : VR Gimbal :
Micro Controller is STM32F1 at 72 mhz.
3 Axis Brushless Direct Drive gimbal :
Roll (MOT1)
Pitch (MOT2)
Yaw (MOT3)
For each channel we have 3 high power pwm 5 Amp output .
I2C IMU that support 3 axis . It is on camera module , so we can know exactly the position of camera and control in realtime the 3 Brushless motors. MPU6050 (6 DOF) + HMC5883 (3 DOF)
1 USB port.
1 Serial port that support mavlink protocol.
1 Power module that support until 3S battery.
4 Radio RC Input for :
Control ROLL Setup.
Control Pitch Setup.
Control YAW Setup.
IR control repeater.
4 Analog Input 0-3.3v
1 IR Out , so is pssible to control a remote camera by its ir receiver.
On new revision 2.0 we add :
customizable push buton.
support for motors ampere monitor for each motors.
Very intuitive Firmware update tools.
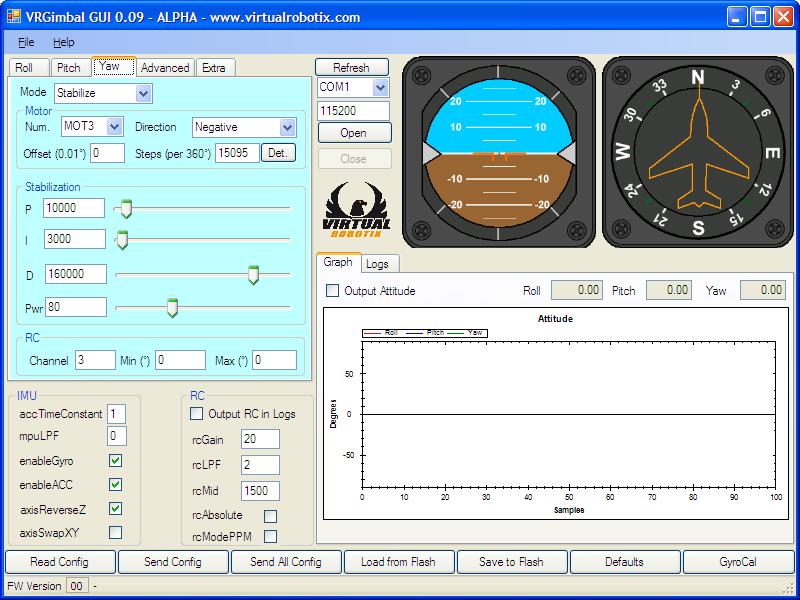
Simple and powerfull VR Gui for VR Gimbal configuration.
Serial driver on USB port.
A complete and updated wiki repository with media gallery with last video from our user.
In this video is possible see the utility available for measure the current used by different kind of motors. This feature is very usefull for evaluate the specification of motors.
Is available a new tools for firmware update you can found more detail here :
So if you want to join in development you are welcome .
This is a screenshot of VR Gimbal Gui developed using .net technology, so could be work also using mono on mac and linux , test on that platform is welcome ,you can connect directly by usb to VR Gimbal or by radio link as 3dr module , blueetooth or other ttl wireles adapter :
We Upgrade also the VRGui with new functionality , slider full support of Pan axis and Full Frame.
With VRGimbal is possible to control this kind of gimbal ;
Handheld and Air Drone Gimbal 2-3axis Entry level gopro gimbal.
Handheld and Air Drone Gimbal 2-3axis Heavy dslr gimbal.
This is an example of video doing by our user of VRGimbal on heavy dslr gimbal :
This is official thread in virtualrobotix community is here join us for have more info and support :
Posted by Roberto Navoni on September 25, 2015 at 10:30am
This is the first Flight of VR Brain 5 LX
These are the picture of first drone controlled by VR Brain 5 LX
After great job did by APM dev team to porting APM firmware on Linux Os our team decide to start to investigate about our design derived by standard VR Brain and ported to Linux .
At the begin we develop a board called Neuron II only as companion computer connected to uBrain as main flight controller and the linux cpu for advanced functionality as low latency video streaming.
After some test we decide to try to merge all our experience on Neuron II and VR Brain on a single design and put inertial sensor like IMU MPU6000 and barometer on VR Neuron II and trasform it in VR Brain 5 LX:)
In our design we evaluate different cpu at the end decide to support RPI 2 cpu and implement on it our hardware design.
Study and understand the new architecture and at the end we done the first real flight by first VR Brain 5 LX. Thanks to Luca , Erik and Matteo for firmware and software development and porting and Diego for hardware design.
In our design we mantain the compatibility with standard VR Accessories like GPS and telemetry and start to evaluate how merge the work done on Neuron II like payload managment , Professional object advoidance ecc to VR Brain LX.
These are the specification of new board :
VR Brain 5 LX
CPU Quadcore 1 GHZ ARM v7 1 Gbyte of RAM ( RPI 2 )
IMU Sensor MPU9250
Barometer : MEAS MS5611
1 Buzzer Output.
1 Led Output .
2 Brushless motor Output ( Option)
1 aditional Imu for external Brushless Gimbal MPU6000. ( Option)
1 serial input for external GPS : VR GPS 8 ( Ublox M8N / T as Option)
1 Vr uBrain as aditional flight control (Option) .
1 i2c bus for additional option like : terara ranger , lidar light , air speed sensor , rgb led.
1 SPI bus for additional IMU / GPS.
4 Analog input .
Lipo voltage 6S.
Current sensor.
Spare channel 1
Spare channel 2
On board 5 volt Bec 6S.
Thanks to VR Lab Team , Diydrones Dev Team , Navio and Erlerobotics team for work done until now on APM code and linux porting . Great Job guys :) I hope in the next months that our team star to contribute on Linux version of APM code ,too
First Virtualrobotix GPS engine using Ublox LEA-6H receiver.
This is a 50-channel high sensitive engine that boasts a Time-To-First-Fix (TTFF) of less than 1 second.
Also provide a rechargeable backup battery to improve warm start.
The dedicated acquisition engine, with over 2 million correlators, is capable of massive parallel time/frequency space searches, enabling it to find satellites instantly.
Innovative design and technology suppresses interference sources and mitigates multipath effects, giving LEA-6H GPS receivers excellent navigation performance even in the most challenging environments.
Virtualrobotix GPS uses an high efficient low noise amplifier to improve antenna signal (19dB) and a SAW filter to select GPS frequencies (see graph below).
It also mounting an ultimate 3-axis digital compass, with selectable interface SPI or I2C (HMC5983).
This one is an high speed (220Hz output) and high resolution (2 milli-gauss) magnetometer.
Features and Specifications:
ublox LEA-6H module
3,3V or 5V Inputs, with low noise 3.3V regulator.
5 Hz update rate
Rechargeable 3V lithium backup battery for high efficient warm start
Panasonic Low Noise Amplifier for antenna signal with high gain (19dB)
EPCOS SAW high quality low-loss RF filter for GPS application
25 x 25 x 4 mm ceramic patch antenna
Dedicated I2C EEPROM for receiver configuration storage
High resolution compass (2 milli-gauss) and high speed (2 milli-gauss)
Power and fix indicator LEDs
ArduPilot Mega compatible 6-pin JST connector
Exposed pads for simple soldering connection.
I2c / SPI HMC5983 magnetometer .
2 ttl tx-rx ser connection.
38 x 38 x 8.5 mm total size, 18 grams.
Some example from log collected in first test VRX GPS is red Line 3DR is blu
The module will be available in may , for more info or pre order contact us at
With VR Micro Brain 5 is possible to develop very light fully autonomous drones , in last months i developed different kind of prototype the main targets was :
- Very light platform only 439 gr.
- With support of micro brushless gimbal 150 gr.
- Support of automatic fly support with high reliability after a lot of test i developed new kind of technology :
a new GPS : VR GPS 8 based on new generation of Ublox 8.
a new VR Leash a device for full control of drone in very simple way.
a new VR micro gimbal 2-3 axis based on nuttx OS with native mavlink support.
- My last target is a long time flight , the first revision of micro drone flew for only 8-10 minutes , now with last updates , new custom motor propeller and battery our time of flight is 27 minutes :)
This is the video of early version of new frame for long time of flight , need to solve some vibration problem i doing all test using EKF and APM Copter 3.2rc12 all work very well.
The next week will be present the new very nice and light frame for our Micro Brain from VR Mechatronic Lab :)
While waiting on the CTX4 V2 CNC work to be done, I have started a new project CX4M (a mini quad). I have finished the CX4M design. Next step is to get someone to do the CNC part (1,5mm carbone). The CTX4 V2 parts have arrived, so I can start working on that frame while waiting.
My CX4M setup:
Frame: 25-26 cm motor – motor (1,5mm carbone)
Motors: Turnigy Multistar 1900Kv
ESC: Afro 12A
Prop: 5x4.5x3
Controller: VRBRAIN (of course) + Ublox lea 6 GPS
LiPo: Zippy Compact 1000mAh 35C 3S
Camera: Mobius (HD recording + FPV)
FPV TX: 200mW 5,8Ghz
CTX4 V2 = C:Carbone T:Tube X:quad type 4:quad CX4M = C:Carbone X:Quad type 4:Quad M:Mini
CTX4 V2 (right) CX4M center plates (left) - The arm design was not ready when this CNC work was done.