I'm happy to share wit you last updates about our cubesat project. The great news is that we adopted ChibiOS operating system and start to develop a flight attitude estimation and control for Cubesat based on ardupilot projects. The other challenge are about the telemetry control system and payload managment.
If some guys in the network are working already on cubesat project or would like to join us in these great project are welcome :)
The main iusse respect of drone development is that is not so simple simulate the flight of cubesat on the earth so we are working also on HIL system for try to simulate what happen in the space . The idea is to add to VR Brain Space the hardware and software compatible with ardupilot project for control a Cubesat in the space .
Hope that you like our projects and join in these great new challenge.
After a few months without important hardware news on our glorious VR Brain 5 Autopilot, here we finally arrived at the moment of truth after almost 10 years since the first VR 8-bit Brain, the Multipilot was the name of our first autopilot , today here is the first X Brain power on , a monster of power with so much potential to explore, thanks to the new firmware Ardupilot that has made giant steps compared to the early code versions.
Interesting OpenSource project that use only a simple RaspberryPI 0 as DVB-S transmitter + RTL-SDR dongle as receiver. This is less expensive DVB-S trasmitter ever developed. All the project is by Evariste he is a great developer and member of HAM Radio community ... now we are working togheter to a revision of system with low latency that fit the requirment of drone community .... now the latency is 2.5 second could became 200 ms with a power ampli for real use in outdoor scenario. If some one would join to beta testing of the system are welcome :) This is the github where you can found the source code of the project .https://github.com/F5OEO/rpidatv
The receiver is an RTL-SDR standard dongle available on store like amazon or ebay for price less 30 $ . The decode is done using SDR technology the software from decoding is from Pabr the name is leandvb . This is the link .
A good news for company that would use Ardupilot Flight Control for professional application . Laser Navigation my company produce VR Brain Flight Control boards this year at 6th board revision for different kind of application succesfully end the Stage 2 of Aerospace Space quality certification AS9100 . The quality certification is for develop drone , hardware and software for aerospatial market.
VR Brain support Ardupilot firmware and our lab support the development of custom hardware for Quadcopter , Plane , Tradhely and Rover and would support Ardupilot.org .
In september start the production of board with this kind of quality process. This is the first step for start to work to Eurocae / FAA certified products and firmware. Are there other company with same level of quality in its production or development process ? Could be nice join force for improve quality of our products around the world.
For more info about pro application , company profile and case history contact me at r.navoni@virtualrobotix.com
Our Facebook group with last info from our lab is here : https://www.facebook.com/groups/vrbrain the language of group is italian but is simple to translate in english or ask directly in Eng and we reply to you :)
The future is here after over two years of work can be said to have developed in the laboratories of Laser Navigation and thanks to the support of the network of laboratories Virtualrobotix drone technology of tomorrow. A short video of a recent test test of our system of autonomous flight, mapping and advanced management of the payload. In the video you can see to your left the management of telemetry and live images from the drone, during production of photogrammetry high definition of this shed, on the right instead you can see the anti collision system , mapping and location on board the drone, working in 3D mode, totally alternative to the GPS with an accuracy of 5 cm. Integrated into our flight control. The system is able through modules VR SLAM and Payload managment to fully manage a mapping mission indoors and inspection giving results very impressive. The localization module that we have implemented is fully compatible with automated features that normally are handled with GPS. So in fact allows both the flight assisted by Lidar that autonomous navigation with impressive precision than a standard GPS. This new architecture named VR Goliath it is compatible with different types of frames is that copter trad hely, but also boat or plane depending on the component and makes' the supply to professional customers and advanced R & D. Soon we are planning at the Technical University of Padua, a faculty Aerospace Professional Seminar dedicated to students, researchers and High Tech companies where they will present the results of these research activities and will experience first hand the latest innovations born out by our lab ... . different professional customers have begun to use these technologies and our feedback from the field in real situations have confirmed the quality tested in our laboratories. To access more information on the platform you can contact me at r.navoni@virtualrobotix.com .
Posted by Roberto Navoni on November 13, 2015 at 11:00pm
These are the first two ready to flight prototype picture of VR Brain Core .
Are available for OEM and Beta tester different configuration of board with STM32F4 or F7 and with some additional connector like USB / SD Card or without connector that normally are available on custom distribution board.
Actually we are working at the first custrom distribution board for our VR Wasp , the ultra light complete drone compliant to under 300 gr drone for urban enviroment .
This is a picture with comparison between VR Brain 5 , VR Brain Core 6 and VR uBrain 5 as you can see the design of the core is adapt for fast protyping and for simple integration inside custom design.
For check the new VR Core 6 on air we decide to use this simple frame in 5 minutes we replace the VR uBrain and test the new board .
In the video you can see the result of first flight ... It's impressive :)
All the APM firmwware normally available for VR Brain 5 : Copter, Standard Hely , Plane , Rover , Boat it's available for VR Core.
Here will be more information about the new OEM board :
We are discussing with Alessio Morale one of the founder of Libre Pilot project for support it inside his project.
I hope that you like this new design. It's not a replace of vrbrain and vrubrain but it's for OEM and special custom design where the integration is the must .
The board is only 5 grams
for more info contact me at : r.navoni@virtualrobotix.com
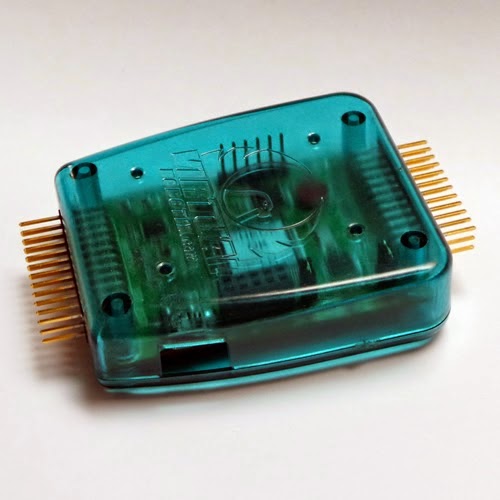
This is the first preview of Next Gen STm32F7 flight control by Virtualrobotix. New core , much power and a reliable solution based on industrial micro controller.
A new oem and hobbyst platform with full support for :
Copter
Helicopter
Plane
Rover
Boat
This new form factor is simple fast prototyping platform for your own custom design but a reliable design for your final solution. Th standard version of VR Brain core 6 support standard STM32F4 micro controller.
Suggestions are welcome.
Will be available in mass production Q1/16 prototypes for our OEM customers will be available in December 2015
If you are not already our OEM partner and are interested to the product contact me at r.navoni@virtualrobotix.com
Posted by Roberto Navoni on September 28, 2015 at 1:00am
Per ottenere questo risultato , nel team di virtualrobotix nell'ultimo anno abbiamo lavorato moltissimo , tanti piccoli ingredienti che hanno contribuito a raggiungere l'obbiettivo.
La miniaturizzazione .
La Micro Brain : Un concentrato di tecnologia .
La nuova telemetria :
Un nuova Gimbal a 2 e 3 assi :
Un nuovo frame leggero e performante con una buona autonomia .
L'aumento dell'affidabilità e della precisione del GPS e del magnetometro.
I nuvoi ESC :
Lo sviluppo di nuovi tecnologie per il volo automatico , semplici ed affidabile:
Il VR Leash
I tools interni di sviluppo : L'interfacciamento al nostro mondo sintetico e Lo sviluppo di plugin avanzati per VR Pad Station : Il modulo X-Trace.
Un favoloso Team di sviluppo che ha continuato ad evolvere il nostro meraviglioso firmware :
Posted by Roberto Navoni on September 27, 2015 at 3:31am
Buongiorno a tutti,
sono felice di presentarvi il primo drone elicottero completamente made in italy :)
Frame dell'elicottero Protos 500
Flight Control : VR uBrain 5
GPS: VR GPS 8
System integration by Ferruccio Vicari :)
nell'ultimo mese di lavoro ho avuto l'onore e il piacere di incontrare personalmente uno degli sviluppatori italiani di APM Helicopter . Sono rimasto incuriosito dal fatto che tra le tante schede VR ubrain vendute per far funzionare multicotteri ci fosse Ferruccio , questo è il nome del nostro Ing. Aeronautico che si sta' occupando di provare e migliorare APM Helicopter su VR Brain / uBrain e anche su Pixhawk che ci chiedeva supporto sul firmware dell'hely e sul nostro hardware per poterci mettere le mani sopra e renderlo performante sui suoi mezzi.
Da quando l'ho incontrato e mi sono innamorato dei suoi elicotteri infatti i lab di Virtualrobotix , nel limite del possibile , stà cercando di dare supporto al suo lavoro cercando di capire meglio come aiutare Ferruccio a risolvere gli attuali limiti sia del firmware che dell'hardware. Mettendo poi a disposizione tutto questo lavoro della community di APM .
In particolare le due caratteristiche innovative presenti nella versione del firmware di Ferruccio sono una curva di gestione del gas a 3 punti che consente di associare alla gestione del collettivo dell'elicottero la potenza necessaria per far volare in modo semplice l'elicottero. E la compensazione del roll in base al passo dell'elica di coda , entrambe modifiche che consentono di fatto di rendere un elicottero estremamente docile.
In questo video si può vedere il video di una delle tante missioni totalmente autonome che il VR Hely è in grado di fare senza alcun tipo di intervento del pilota ne in fase di decollo tantomeno in fase di atterraggio.
ecco il video :
Questa e' una foto dell'installazione della micro brain e del sistema anti vibrante:
Questo e' il grafico delle vibrazioni presenti sulla VR uBrain merito del frame del Protos 500 e anche delle soluzioni adottate per tagliare le vibrazioni sulla flight control
Altra caratteristica non banale è il contenimento delle vibrazioni e anche qui Ferruccio ha fatto un lavoro egregio inventandosi un supporto in grado di tagliare il piu' possibile le vibrazioni e rendere di fatto al pari di un normale quadricottero.
Tanto semplice che ho chiesto a Ferruccio di poter provare anch'io con un vecchio T-rex 470 di capire quanto fosse diverso pilotare un elicottero rispetto a uno dei classici quadricotteri che ormai piloto da anni.
Il risultato è stato strepitoso in 2 voli ero già completamente a mio agio.
Sicuramente questi sono mezzi complessi e pericolosi , bisogna avere competenze per poter fare un setup idoneo e poi bisogna usarli con cautela ma in quanto a risultati di tempi di volo con motori a benzina e payload trasportabili non c'e' paragone con nessun altro tipo di velivolo , ne VTOL , ne Aereo tanto meno quadricottero.
Il video del mio primo decollo con la VR uBrain 4.5 sul mio Trex 450
E questo e' il mio secondo volo , mai fatti volare prima elicotteri ... direi incredibile :)
Qui potete trovare tanti interessanti video di Ferruccio sui suoi meravigliosi elicotteri .
Posted by Roberto Navoni on September 27, 2015 at 3:30am
Goodmorning everyone, I am happy to present the first Drone helicopter completely Made in Italy :)
Frame Protos 500 Helicopter
Flight Control: VR uBrain 5
GPS: GPS VR 8
System integration by Ferruccio Vicari :)
last month of work I had the honor and pleasure to personally meet one of the developers of Italian APM Helicopter. I was intrigued by the fact that among the many cards VR ubrain sold to run multicotteri there was Ferruccio, this is the name of our Ing. Aeronautical you are 'working on to try and improve on APM Helicopter VR Brain / uBrain and also on Pixhawk He is asking us to support firmware dell'hely and our hardware to be able to get their hands on it and make performance on its means.
Ever since I met and fell in love of his helicopters in fact the lab Virtualrobotix, whenever possible, is trying to give support to his work trying to better understand how to help Ferruccio solve the current limits of both the firmware of ' hardware. Putting all this work then available Community APM.
In particular the two innovative features present in the firmware version of Ferruccio are a curve of the management of the gas 3 points that allows to associate to the management of the collective of the helicopter, the power required to fly in a simple way the helicopter. And compensation roll according to the pitch of the tail, both changes that actually make a helicopter extremely docile.
In this video you can see the video of one of the many missions that the totally autonomous VR Hely is able to do without any kind of interference from the pilot it during take-off nor on landing. here's the video:
Questa e' una foto dell'installazione della micro brain e del sistema anti vibrante:
This and 'the graph of vibration present on VR uBrain about the frame of Protos 500 and also of the solutions adopted to cut the vibrations on the flight control
Another feature is the non-trivial reduces vibration and also here Ferruccio did an excellent job inventing support can cut the most 'can make vibration and actually like a normal quadricopter. So simple that I asked Ferruccio could feel myself with an old T-rex 470 to understand how different it was to fly a helicopter over a classic quadricotteri pilot who now for years.
The result was sensational in the second flight I was completely at ease.
Surely these means are complex and dangerous, you have to have skills to do a suitable setup and then you have to use them with care but as a result of flight times with petrol engines and payload transported there 'comparison with any other type of aircraft, it VTOL plane it much less quadricopter.
The video of my first flight with the VR uBrain 4.5 on my Trex 450
And that 'my second flight, never flown before helicopters ... I would say amazing :)
Here you can find many interesting videos on its marvelous Ferruccio helicopters.
Posted by Roberto Navoni on September 25, 2015 at 10:30am
This is the first Flight of VR Brain 5 LX
These are the picture of first drone controlled by VR Brain 5 LX
After great job did by APM dev team to porting APM firmware on Linux Os our team decide to start to investigate about our design derived by standard VR Brain and ported to Linux .
At the begin we develop a board called Neuron II only as companion computer connected to uBrain as main flight controller and the linux cpu for advanced functionality as low latency video streaming.
After some test we decide to try to merge all our experience on Neuron II and VR Brain on a single design and put inertial sensor like IMU MPU6000 and barometer on VR Neuron II and trasform it in VR Brain 5 LX:)
In our design we evaluate different cpu at the end decide to support RPI 2 cpu and implement on it our hardware design.
Study and understand the new architecture and at the end we done the first real flight by first VR Brain 5 LX. Thanks to Luca , Erik and Matteo for firmware and software development and porting and Diego for hardware design.
In our design we mantain the compatibility with standard VR Accessories like GPS and telemetry and start to evaluate how merge the work done on Neuron II like payload managment , Professional object advoidance ecc to VR Brain LX.
These are the specification of new board :
VR Brain 5 LX
CPU Quadcore 1 GHZ ARM v7 1 Gbyte of RAM ( RPI 2 )
IMU Sensor MPU9250
Barometer : MEAS MS5611
1 Buzzer Output.
1 Led Output .
2 Brushless motor Output ( Option)
1 aditional Imu for external Brushless Gimbal MPU6000. ( Option)
1 serial input for external GPS : VR GPS 8 ( Ublox M8N / T as Option)
1 Vr uBrain as aditional flight control (Option) .
1 i2c bus for additional option like : terara ranger , lidar light , air speed sensor , rgb led.
1 SPI bus for additional IMU / GPS.
4 Analog input .
Lipo voltage 6S.
Current sensor.
Spare channel 1
Spare channel 2
On board 5 volt Bec 6S.
Thanks to VR Lab Team , Diydrones Dev Team , Navio and Erlerobotics team for work done until now on APM code and linux porting . Great Job guys :) I hope in the next months that our team star to contribute on Linux version of APM code ,too
The dimension is like a GOPRO so the Standard GoPro Gimbal are compatible with Thermal Inspector.
This is the first power on and testing of last revision of our device
After some months of development we are near to release the first version of VR Thermal Inspector.
These are the specifications :
Sensor : Flir Lepton 3 160 x 120 ( PRO)
Integrated IMU : MPU6000
Integrated Barometer : (Option)
1000 mah Battery until 4 hours in power on mode.
Form Factor like a GoPro
Wheight 40 grams
CPU STM32F4 407
Nuttx Operating Systems.
SD Card SDIO : High Speed
Integrated Wifi or BT Module (option)
3 Multi Function Button : Power On / mode / picture /video
Digital Input / Output :
1 Buzzer
Digital Output ON / OFF
3 PWM Output PWM 1 Digital PWM input
1 Analog Input
1 Serial Port TTL
1 Serial Port connected to Wifi or BT module
RGB LED
USB Port
Functionality :
Live Video Recording.
Take a picture every X second ( 5 - 10 - 15 )
Take a picture after an event.
Preview streaming by usb wifi /bt/ serial port.
Palette Settings
Radiometric functionality each pixel information have a specific absolute temperature.
Available API via USB / Seriale / wifi
On board Blob detection and tracking by PWM Roll / Pitch/ Yaw
Beeper activation at specific event.
on/off activation at specific event.
Companion Computer Add on for advanced functionality like PAL output or advanced robotics functionality by Mavlink or ROS interface to robotics systems : VR Brain / Pixhawk FC
On Board advanced events triggered by specific temperature detection.
Application available for Smarphone: Andoroid / IOS e or Windows Personal computer.
Preview of Android Application
PC Application Preview in early prototype version based on VR uBrain 5.1
This is an example of visual ispection of a building did by a drones.
We intend start a Kickstarter in September , we would like to raise some pre order because we want produce a mold for plastic enclosure and for obtain a good price from Flir for lepton modules . Before to start we like to understand what do you think about this product . Suggestions are welcome. The target price will be 450 - 600 euro we are working on the bom price for finalize the selling cost .
If you are interest to more detail or help us to going in production with this new cool product don't exitate to contact me at r.navoni@virtualrobotix.com
To our knowledge the first Italian "drone" for professional use in the range below 25 Kg. In obtaining the type certificate of the DGAC, the SPARK of developed by Italian VitualRobotix arrives in France after having been recently recognized in Italy to carry out aerial work. (See also: SPARK, the drone Italian ENAC recognized for non-critical actions) Based on autopilot VR Brain PRO 5.2 is running on a customized version of Arducopter 32-bit, the SPARK today in France can carry out aerial photography, surveying and aerial work in general, in the scenarios S2 and S3 using as ground control also the VR PAD Station and the mission planner (see also: The no flight zone on the VR Station PAD)
The scenario S2 is to work up to 1000 meters away from the pilot even in EVLOS and a height of less than 50 meters but no people in the area of operations
L 'S3 is related to visual flight in urban scenarios and / or in close proximity to people and animals but with a maximum distance from the pilot di100m
Congratulations to VirtualRobotix facing in a market which now sees 1,622 active Operators , 2849 registered drone and 1764 allowed to operate in urban areas (means of mass less than 2 kg or up to 4 kg if equipped with a parachute) with no accidents from 2012, date on which the Regulation entered into force on French Drone Market.
Drones and aerial work in Italy. Despite some difficulties of a regulatory and bureaucratic, dictated by the regulation on unmanned aircraft, now almost every day ENAC recognizes operators and means to do the non-critical and authorizes (in number sharply less) to mixed critical operations.
Currently there are 232 operators SAPR.Of these, those who use drones Italian counted on the fingers of one hand.In fact, the means that are all the greater in non-critical actions are based on systems of DJI (70% of the total), suitably modified to be recognized, of which 20% are constituted by DJI Phantom.
VIRTUALROBOTIX 350 SPARK THE DRONE ITALIAN FOR AERIAL WORK
In this scenario stands recognition ENAC achieved today by 'very Italian VirtualRobotix that for the first time enters the Olympus of Drones that can perform aerial work It is quadcopter SPARK 350. It is a true Italian product made in almost all components from VirtualRobotix.Only motors and controllers (ESC) are not made "in house".Not for long, however, the reality of Bergamo is also planning the ESC.
Even the design is Italian, the body is designed by Flavio Taborelli, printed in SLS, made with a mix of ABS and composite materials to have a proper balance between flexibility and rigidity.
Inside the autopilot is called VrBrain 5.2: a flight control 32bit made in VirtualRobotix whose hardware and sensors have also been taken as an example by the Pixhawk3DRobotics who had initially chosen another type of accelerometers and gyroscopes getting bad results forced to run for cover immediately after choosing the same path of VRBrain.And the GPS? He also designed by VirtualRobotix, updates the previous VR GPS module which now uses the NEO 8
NO INTERNAL WIRING
The Italian news are not finished, the SPARK has no wiring.Inside the frame using a particular card that serves as integrated modular distribution board and connects esc and motors.The standard version also mounts an OSD with tx and video room integrated fpv navigation and you can switch between the cam navigation and video preview of the room installed on the gimbal
FIRMWARE FLIGHT ARDUCOPTER
VirtualRobotix, in the person of Roberto Navoni, was the founder and contributor of codeArducopter now called APM: Copter.The version of firmware that runs on VRBrain is properly optimized for the hardware VRBRain but has the exact same functions of the official version.For these reasons we can say that the firmware is made in VirtualRobotix even if the project is actually open source.
TERMINATOR AND PARACHUTE The SPARK recognized by 'ENAC weighs 1.8 Kg and has terminator flight andparachute.It can be considered the Italian answer to DJI Phantom , a 'statement that from now on it is also valid for the professional field. For more information on SPARK 350: www.virtualrobotix.it
THE SPARK 350 IN ACTION
Original Blog post by Danilo Scarato Quadricottero News :
RC Lipo Battery Pack is built with the highest quality single cell that engineered and optimized specifically for RC planes and RC cars.Unmatched energy and power density has increased the flight time (about twice as long as NiMH packs). Comparing with NiMH or NiC packs,significantly decreased weight and smaller physical size easily fit in your RC aircraft. No memory effect. The ability to supply current is at high rate.
Product Advantages:
(1) Adopted the world's key material-LiCo02.
(2) Used fully automatic lamination machine with Nano Tech.
(3) Long cycle life more than 500 times.
(4) Lighter, high safety without fire and explosion 6. Being covered by PICC.
In last months virtualrobotix lab work hard on a "secret alter ego project" our target was add low cost companion computer and add advanced functionality to our Flight Conrol .
During last fair in Milan spoke with Michele about the problem of analogic trasmission during the FPV Racing because the indoor situation create a lot of rf iusse . During our development work a lot on low latency and redundace system. So that was a good application where understand if our work was good or not for control the drone in fpv mode and with digital control channel.
Actually we are not already update vr pad station with last update but we are work in progress so decide to do a test with PC connected to the drone.
Raspberry PI 2 with a prototype of custom HDMI digital input , a standard RPI camera or usb h264 cam.
A Wifi AC dongle.
The micro brain is connected to companion computer by usb port and we developed a custom application that transport mavlink protocol and support a custom API functionality , but is possible to use mavproxy or drone kit ,too. I prefer c/c++ or java app not python.
By our api is possible to activate by ground station video and remote control on mavlink for control the drone with very low latency so is possible to control the drone in stable mode.
During the test we are incredible surprised we don't have any artifact and don't lost the video link ... we did some test on outdoor until 400 m without big problem. :)
This is only the begin of the project for update your "old" vrbrain technology with new advanced digital functionality to your drone :)
In our api is already implemented the API for control sony camera and GO Pro 3/4 cam with preview trasmission to ground station :)
If you need more info about our tecnology contact me at r.navoni@virtualrobotix.com we have a secret group in fb of developer that are join at early version of our development :)
VR Spark 350 born after a year full of experiments, where we worked on improving electronic technologies, mechanical design, usability for end user and the possibility to be used for commercial purposes respecting regulation rules that govern the use of drones in the civil aviation world.
We implemented control systems and flight termination to ensure compliance with the Italian and French rules , now start to work on U.S to achieve high levels of safety and reliability. Current configuration with Brushless Gimbal , GoPro 4 and Parachute is 1.3 kg . It has a maximum take off weigh of 1.8 Kg. (3.4 pounds) to take advantage of the imminent FAA and European regulations that will enable smaller drones to fly in restricted areas.
We are currently undergoing experimentation to achieve Italian and French approval for commercial use, and plan to start selling in April.
We are searching partner that want support us for VR Spark Section 333 FAA certification.
for info contact me by skype my account is : virtualrobotix or at my email r.navoni@virtualrobotix.com I'll be present during ELC Technical Showcase in San Jose.
VR Spark 350 main applications are:
low budget filmography.
safety and rescue.
Video inspection .
Marketing (drones branded for promotion - delivery -)
Automatic features as follow me through VR platform Leash. (Action Sports)
Photogrammetry.
Training schools for professional pilots.
Suitable for drones startups company and research projects (eg H2020).
Example of filmografy :
Example of our Flir based Thermal image sensor :
This multi role machine aims to enter as a protagonist in the business services using drones. It has all the features to aspire to be the Italian answer to the Chinese DJI Phantom. The semplicity and portability of a DJI Phantom, but with so many more payload options and flexibility!
This is last Technical Specification: (Updated)
Innovative Italian Design and special painting technology.
Frame configuration : Multicopter Quad .
Propeller: 9x4.5 Option 10x4.5
Motors: 980 KV
Time of flight 18 min.
Weight : 1.3 kg in full configuration Gimbal , GoPro 4 Camera and Parachute .
Flight Control : VR Brain 5.2 PRO ( VR SPARK CUSTOMIZATION)
GPS : VR GPS 8 GNSS dual mode navigation system GPS / GLONASS. until 18 sat and HDOP < 1.5
Flight Termination System : VR Flight Stop PRO Power Cutoff + Parachute.
Luca ... The Flight Stop work fine ? ... Opsss :)
Radio Link:
Primary: SBUS FRSKY X4R
Secondary: Flyght Stop : PPMSUM FRSKY D4R
Telemetry:
FRSKY S.PORT (Telemetry information available on Taranis display LUA Script customizable ) .
VR Link 868 / 915 (Mavlink telemetry module)
VR OSD - option - ( Video overlay main telemetry information : attitude , GPS , Battery)
FPV Functionality :
CCD camera integrated in the drone .
5.8 Ghz Video TX .
Video Switch between the FPV Camera and GoPro 4 .
Voltage and Hall effect Current sensor integrated on distribution board.
Special Drone Code 1st Meeting version support on board RaspberryPi .
It is thanks to the work of a large community made up of people with great competence, passion and technological skill that this project has seen the light.
Thanks to Virtualrobotix and the APM:Copter DEV team which has done an excellent job bringing this platform to high levels that was, in its infancy, within the reach of only a few experts.
Now after extensive work on the simplification and usability, so many more professionals can enjoy the flexibility and power of this platform.
I'm happy to present the prototype of Virtualrobotix thermal camera.
In last months we work a lot on this new project , it's based on new Flir Lepton sensor and VR uBrain 5.1.
We implement an a specific firmware on uBrain for control the flir sensor , read image , trasmit it in realtime by USB or Bluetooth to PC or Mobile application.
The actual function supported in early prototype are :
Live video streaming.
Recording on SD card.
Snapshot by event (push a button or specific programmable event).
We storage raw data and telemetry data from sensor so is possible to have a very detailed information about the temperature of all the point available in the image .
Is possible to analyse the image of VR Thermal Camera in realtime or in post processing with a specific appication.
Actually we are developing specific application for our UAV especially for VR Spark as an alternative payload , actually we intend to propose this solution for video inspection in energy enviroment or solar field and a lot of other UAV or not UAV application if you are interested on this kind of technology contact me at :