Posted by Marc LE BRET on November 27, 2013 at 9:30pm
Hello,
At least with the latest firmware, I was able to log IMU data and download it. This flight was a test with auto take-off, some waypoints with altitude changes and auto landing. I did it twice with the same result. I'm happy with my quad.
Here are some screens of X and Y acceleration data, GPS Data (Sat number and hDop), Altitude Data, and trace of the flight on GoogleMap.
we are very proud to show you the first test of our VRGimbal for Nex 7, the first ready to use gimbal developed by Virtualrobotix.
This video was done by Flavio, chief product developer and excellent pilot.
The aim was to check the goodness of stabilization done by our VRGimbal Brushless Controller Board and verify the effectiveness of our anti vibration system.
We are very happy with the results, so next week the first batch of VRGimbal for NeX7 will available to our beta testers for in flight checks and validation.
Soon after the tests we will start market production.
This ready to use gimbal will be available in 2 axis and 3 axis configuration and will support small and medium cameras such as Nex7, Sony CX410, Sony PJ780 and Canon EOS M.
The Gimbal will be available with custom profiles to better adapt to your camera.
The name of our revision is APM Copter rev 3.1.11 this release is without OS , We have also available the NuttX-PX4 revision of code but only in alpha revision for dev team test.
On VRBrain the Arducopter code use use only 6-7 % of cpu resource .... on APM 2.x use from 70 % to 95 % of cpu ... so we have a lot of resource available for doing reliable test of advanced functionality . The code need only 480 kbyte we have available 60 % of flash for develop new functionality .
Last revision of code work very well ... we are very happy of these fly result ... in italy a big community of user start to switch to VRBrain from Arduflyer or Cirus Board AIO.
SPI BUS speed for MPU6000 increased to 8MHz ENHANCEMENT of MPU6000 enabled by default (MPU6000 @ 1KHz and gyro full scale @ 1000dps) update to latest 3.1rc5 of arducopter code Corrected bug in Dataflash log download Yellow led on board now show Scheduler activity.
Please upgrade to this release following this link.
THe Gyro and Accels now are sampled at 1KHz instead of 200Hz and main loop averages 10 samples every main loop.
This has imprved flight performance, but it is still in test, so use accordingly. With this version you can try to rise the INS_FILTER partameter to 42Hz or 98Hz, but you must have vibration under control.
This video is doing by our VRGimbal user VR Gimbal with Sony 3D HXRNX3D1U ( 720 gr) in handeld mode
This is a video using complete VRGimbal with Panasonic GH2
..and this is another video of the same copter (in HD)
Dear Friends,
These are specification of our : VR Gimbal :
Micro Controller is STM32F1 at 72 mhz.
3 Axis Brushless Direct Drive gimbal :
Roll (MOT1)
Pitch (MOT2)
Yaw (MOT3)
For each channel we have 3 high power pwm 5 Amp output .
I2C IMU that support 3 axis . It is on camera module , so we can know exactly the position of camera and control in realtime the 3 Brushless motors. MPU6050 (6 DOF) + HMC5883 (3 DOF)
1 USB port.
1 Serial port that support mavlink protocol.
1 Power module that support until 3S battery.
4 Radio RC Input for :
Control ROLL Setup.
Control Pitch Setup.
Control YAW Setup.
IR control repeater.
4 Analog Input 0-3.3v
1 IR Out , so is pssible to control a remote camera by its ir receiver.
On new revision 2.0 we add :
customizable push buton.
support for motors ampere monitor for each motors.
Very intuitive Firmware update tools.
Simple and powerfull VR Gui for VR Gimbal configuration.
Serial driver on USB port.
A complete and updated wiki repository with media gallery with last video from our user.
In this video is possible see the utility available for measure the current used by different kind of motors. This feature is very usefull for evaluate the specification of motors.
Is available a new tools for firmware update you can found more detail here :
We release a Major release 1.0.12 we add a lot of new functionality and full support of pan stabilization with 1 IMU sensor or two sensor .
The accelerometer 6 position (scale and level ) calibration is a one-time configuration. You need to do it the first time you power up the board after the firmware update (or if you change your IMU board), then you can save the calibration parameters and don’t worry anymore.
Power up the board and connect it to the VRGimbalGUI 0.11
Open the “Logs” tab
Write AC in the command line textbox and click on “Send Command”
Follow the procedure moving the IMU as requested. After each step click on “Send Command”
If the calibration is successful send the ASC command using the command line textbox
Click on “Save to Flash”
rev 1.0.12
Minor bug correction
Accelerometer 6 position (scale and level) calibration with saved parameters (see below)
rev 1.0.11
Stabilize mode on Yaw
Corrected stabilization issues for pitch near 90°
Configurable PWM frequency
Support for auxiliary IMU for more precise Yaw measurement (see here for more information)
Gyro calibration can be saved to avoid calibration at startup
Added radio channel for position reset of each axis (you can use the same channel to reset two or three axis)
rev 1.0.9
Experimental Stabilize mode on Yaw (good with small pitch values)
Experimental Follow mode on Yaw (need motor steps calibration and PID reconfiguration)
Experimental support for second IMU for precise Yaw measurement (contact us for more info)
Added support for analog/digital input (like joysticks and buttons) to be used in alternative to RC:
configure channel 100 to 105 to use analog input 1 to 6;
use the “JYC” serial command and follow the instructions to calibrate the inputs.
rev 1.0.5
Completed PID mode on Roll and Pitch, with support of RC commands.
Manual (RC) mode (to be used on Yaw for now) working but requires improvement.
So if you want to join in development you are welcome .
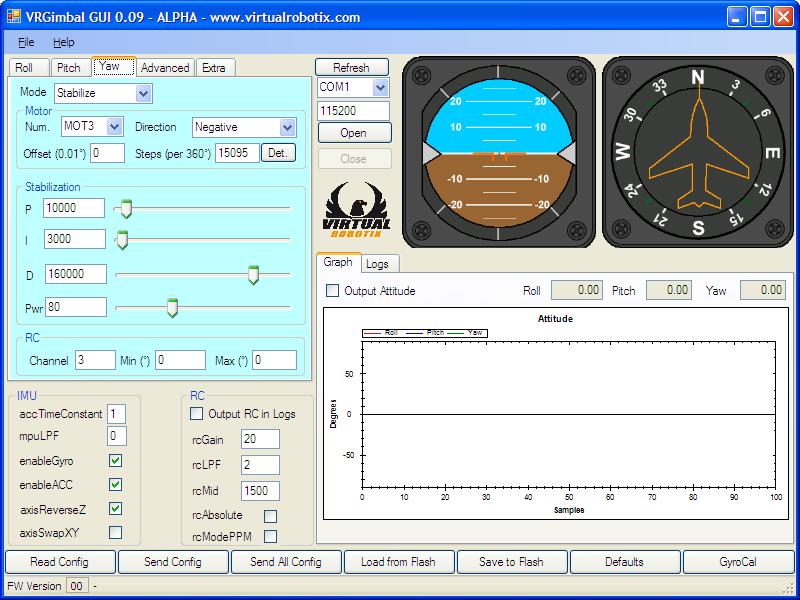
This is a screenshot of VR Gimbal Gui developed using .net technology, so could be work also using mono on mac and linux , test on that platform is welcome ,you can connect directly by usb to VR Gimbal or by radio link as 3dr module , blueetooth or other ttl wireles adapter :
We Upgrade also the VRGui with new functionality , slider full support of Pan axis and Full Frame.
With VRGimbal is possible to control this kind of gimbal ;
Handheld and Air Drone Gimbal 2-3axis Entry level gopro gimbal.
Handheld and Air Drone Gimbal 2-3axis Heavy dslr gimbal.
This is an example of video doing by our user of VRGimbal on heavy dslr gimbal :
This is official thread in virtualrobotix community is here join us for have more info and support :