Guten Tag.
Hi.
My eniviroment to avoid requests.
Hardware:Gigabyte i7, 16GB Ram, a lot of HD's
OS Windows7_x64, Kubuntu 10.04
Relevante Software:
Arduino 1.03, 1.5
Visual Studio's
Atmel Studio 6.2
IDE PX4
Missionplanner latest
STM DFU
IDE VRBRAIN
Controllers: ArduMega 2560, APM2.5, PX4FMU/IO, china clone apm2.5,
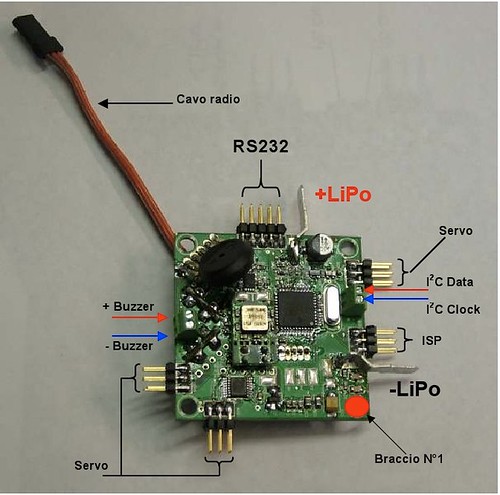
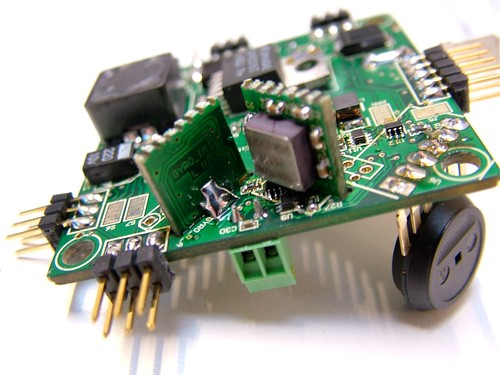
last but not least VRuBrain 5.1
Tools: AVR-Dragon, AVR-MkII, usb-scope
ToFly: lot of planes, copter,
Upload to VRuBrain the official Firmware with Missionplanner OK
Connect GPS, Compass, Receiver OK
Problem: Firmware is not build For RC-Channel-Map of my transmitter.
Changed mapping with Missionplanners Patameterlist.(with write params like amp/px4).
Restart, No effect. mapping not changed
Downloaded from web variante xxxx_pwm.vrx.
The same.
Downloade Sources and compiled.
Got xxx.hex, xxx.bin .......
Tried upload with Missionplanner xxx.hex(like apm); Miisionplanner not accepts my hex.
Converted .hex to .dfu, Upload with STM-Tool OK.
But the bootloader is destroyed, Missionplanner can't connect.
I could cross the wires in pwm, but I think the is not a smart solutiom.
Help.
HOWTO build myFirmware.xxx accepted and uploading by Missionplanner.
Missionplaner accepts Firmeware.vrx downloaded from web.
How can I build myFirmware.vrx or myFirmware.???.