This is the official link of ProS3 TEAM
http://www.pros3.it/?q=node/161
Hi Team,
in this days I'm working to patch the AQ 2.0 firmware to support MultiPilot Board.
So I add :
Some Patch on original firmware because in not yet ready :) So I'm in contact with mirko to solve some small bugs :)
The source code is available here : http://code.google.com/p/lnmultipilot10/source/browse/#svn/branches/Redfox74/AeroQuad20MP
Regards
Roberto
I'm trying the stable mode with the accelerometer.
PIANFORMOSA 26 6 2010 promo from Tittap123 on Vimeo.
Thank to Mario for this beautiful day and Tittap for his Great Video :)
Roberto
Un saluto a tutto il gruppo e un ringraziamento a Roberto per l'ospitalità
Da circa 2 mesi sto lavorando ad un progetto di un multicottero che ho battezzato ArmQuad
Le caratteristiche sono:
Processore: ARM7 32Bit LPC2103 a 60Mhz
Gyroscopio: ITG-3200 triplo giroscopio da 2000°/s, interfacciamento I2C, 16bit, vari tagli di filtri passa basso selezionabili via software,sensore di temperatura integrato
Accelerometro: BMA-180 triplo accelerometro , interfacciamento I2C, 14bit, vari tagli di filtri passa basso, passa alto, passabanda selezionabili via software, sensore di temperatura integrato
Regolatori brushless: PWM commerciali pilotati a 450Hz
RX: è necessario un ricevitore con uscita seriale dei canali radio o in alternativa un convertitore parallelo / seriale da aggiungere ad una RX con uscita standard.
Tempo di esecuzione del ciclo loop completo con la configurazione attuale : circa 500microsecondi, 2Khz
La mia filosofia di costruzione e' di tipo step by step, si passa allo step successivo sia hardware che software soltanto quando lo step in corso e' terminato e funziona in modo ottimale oltre che sulla carta anche nei test di volo reale, questo consente di non trascinare eventuali errori hardware/software negli step successivi.
Dopo aver effettuato il primo volo utilizzando i giroscopi presenti all'interno del wii motion plus, ho deciso di impiegare i sensori sopra riportati, la routine di volo iniziale era la modalità ACRO, basata sul controllo retroazionato della velocità angolare.
In questi giorni ho integrato l'accelerometro e sto quindi testando la modalita' "autolivellante / stabile" basata sul controllo dell'angolo.
I prossimi upgrade saranno l' utilizzo di un ARM M3 Cortex a 100Mhz, l' integrazione di barometro i2c, compasso magnetico i2c e GPS per la navigazione a waypoint
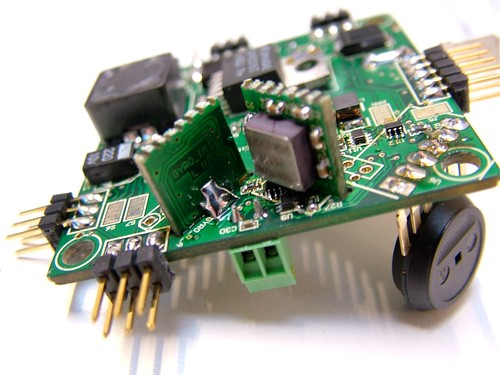
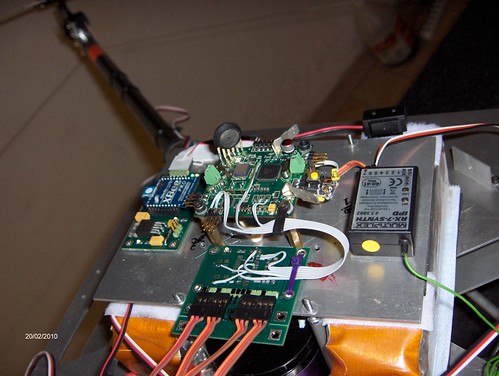
Sotto video del primo volo e alcune foto, i cablaggi sono ancora approssimativi in quanto mi trovo in piena fase sperimentale.
Saluti,
Danilo
Hi All,
this is my experimental project of a quadrorotor, ArmQuad:
ARM 7 32bit LPC2103 a 60Mhz
ITG-3200 Triple-Axis Digital-Output Gyro, 16bit, digitally-programmable low-pass filter
BMA180 Triple Axis Accelerometer, 14Bit, Programmable integrated digital filters
ESC: PWM at 450Hz
R/C RECEIVER: PPM composite signal
CONTROLL LOOP EXECUTION TIME with the current configuration : 500 uS, 2 Khz
After the first flight using the Wii Motion Plus in ACRO mode now I'm testing the angular control mode, the next updates will be:
ARM M3 Cortex 100Mhz
Barometric Pressure Sensor
Compass Module
GPS and waypoint navigation
Regards
Danilo
Alpago 2010 - Sessioni di volo in FPV con Tittap123 e Jijuja from Duncan Drake on Vimeo.
Some FPV fly session doing by Jijuja (Developer of Fox Hybrid) and Tittap , the video is doing by DDrake ... thank at all for this great video :)Salve a tutti,
mi sono iscritto a questa comunità, anche se non so ancora bene come funzioni… Perdonatemi se faccio qualche CZ ! ;-)
Comunque, vorrei apportare un piccolo contributo con la mia modesta esperienza.
Qualche anno a dietro, andando in villeggiatura in auto, ero in coda sotto il sole rovente,
mi scatta l’ispirazione del volatile !
I quad erano agli albori, qualcuno osava mettendo insieme qualche giroscopio, altri deviavano verso un tricottero…. Tutto molto affascinante per me che stavo cominciando la mia carriera da modellista!
Di mestiere faccio e ho sempre fatto il tecnico AF, ma la micro-meccanica e l’elettronica ha sempre rapito la mia attenzione.
In quella calda giornata di Luglio, chiamai al telefono il mio amico Gianni, modellista veterano, mente brillante con nozioni di fisica, scatta la prima domanda… perché i quad sono così goffi e instabili? Analizzando le caratteristiche, attribuimmo tutto ai giroscopi e soprattutto alle latenze nella correzione d’assetto, dovute all’inerzia del blocco motore/elica.
Come migliorare tutto questo… un quad a passo variabile?, Si...
Lasciando giri costanti si poteva variare il passo, per correggere non bisognava aspettare che i rotori prendessero giri, ma avendo già il motore a regime, si aveva una riserva di energia “Pronta” per essere convertita dalle eliche a passo variabile, fin qui tutto filava come l’olio, anzi si poteva usare un solo motore per la propulsione, con tutti i benefici che ne potevano derivare.
Facendo due conti con le rotazioni e le coppie, cominciarono i primi problemi che aumentarono quando entrarono in gioco le miscelazioni … Il progetto fù abortito sul nascere….
Nei giorni a seguire, dagli e ri-dagli il quadricottero a passo variabile non voleva abbandonare la mia mente, e pian pianino, furono superati tutti quei lati oscuri che almeno teoricamente trattenevano a terra il quad.
Risolti, anche se con qualche riserva da verificare in seguito, tutti i problemi legati alla gestione meccanica, decisi di provare ! Investendo tempo e denari nella costruzione di un simulacro, per verificare la teoria.
Cominciai a buttare giù qualche appunto sulla costruzione, e a disegnare i vari pezzi del corpo centrale, cominciando dalla scatola cambio, dove avviene la riduzione e l’inversione delle rotazioni
Cercai di ridurre al massimo i costi, anche perchè c’erano quei dubbi purtroppo fugabili solo con un test-fly…
Qualche mese, e…Meccanica pronta, alimentata da due motori elettrici … mancava il “pilota”.
Cominciai una nuova avventura cercando qualcuno che mi facesse un software dedicato per il mio maxi-quadricottero !
CARATTERISTICHE HG3 :
4 eliche di 70 cm ciascuno è possibile utilizzare elica fino a 120 cm.
Dimensioni: 2,50 x 2,50 mt
Alimentazione: 12s Lipo
Motori 2 Potenza totale sono : 4400 W
Peso 6,5 Kg al decollo


Tante persone si spaventavano vedendo quella macchina che aspettava solo un po di software, un progetto senza dubbio molto impegnativo, ma non impossibile, comprai un po di hardware e sistemi di sviluppo, preso dalla disperazione, tentai il fai da te, ma ovviamente non sono programmatore e a 45 anni non si può imparare, tra una prova e l’altra, il quad è rimasto appeso al chiodo per circa due anni, fino a quando non mi sono imbattuto in un forum, e in un certo REDFOX… Il nome non ispirava molta fiducia, ma dopo tante, decisi di provai anche questa.
Contrariamente al suo nick Roberto, per quanto mi riguardi, è una persona simpatica, molto disponibile, competente e umana!
C’è stato da subito un certo feeling, ed insieme in poche settimane abbiamo messo a punto un hardware capace di pilotare la mia macchina, che da allora ho battezzato HG3.
Pochi test sono bastati a capire che poteva volare, e dopo il terzo tentativo ecco i risultati.
HG3 è servita a testare il mio progetto e la scheda di controllo, adesso ha lasciato il tavolo per essere riappesa al chiodo, lasciando il posto al suo successore HG3.2
Riguardo HG3 troverete info anche qui.
HG3.2 sarà una macchina ideata per “alzare peso” e sperimentare altre fonti di propulsione…
Per ora è tutto
Giuseppe D’Angelo
(Pipposoft)
HG3 l'era del quad a passo variabile è iniziata !
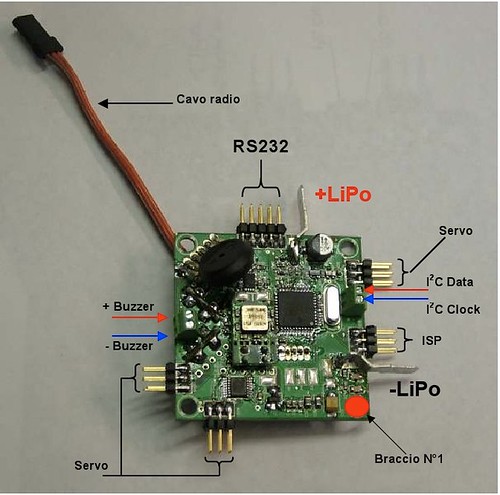
Multi-Pilot Base Board
Multi - Sensor / Navi
You need this board configuration for automatic navigation.
4 Ir-Sensor
1 Ultrasound range finder
1 Magnetometer
1 GPS 54 CHN 10 HZ
Hello everyone,
The LN MultiBoard 1.0 board details :
visit the site of company that develop LN Multipilot 1.0 http://www.lasernavigation.it visit https://www.youtube.com/rnavoni to see LN Multipilot 1.0 in action. visit http://code.google.com/p/aeroquad/
I'm starting to support the project the goal is to port Aeroquad
firmware on MultiPilot